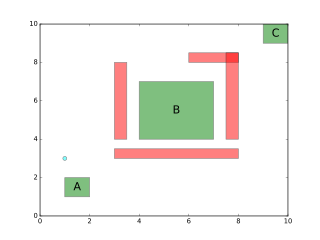
TWTLPlan is a tool to solve a 2D path planning problem where the path must satisfy a specification given as a Time-Window Temporal Logic (TWTL) formula. A TWTL formula formally captures the notion of visiting regions of interest in order and staying in them for a period of time. For example, a specification in natural language such as "perform task A of duration 1 within 2 time units; then, within the time interval [1, 8] perform tasks B and C of durations 3 and 2, respectively; furthermore, C must be finished within 4 time units from the start of B;" would correspond to the following TWTL formula:
f = [H^1 A]^[0, 2] * [H^3 B ^ [H^2 C]^[0, 4]]^[1, 8]
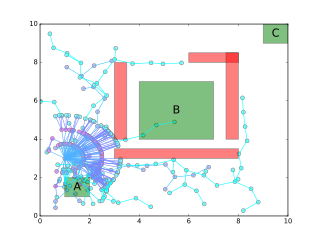
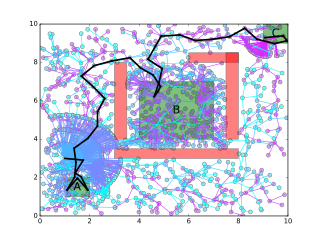
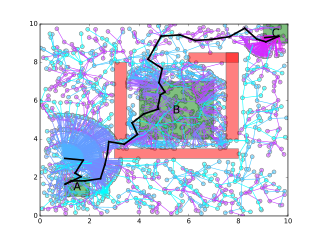
A key feature of TWTL is that a formula may be relaxed, i.e., we can add a variable delay to each deadline. A relaxed formula with a positive delay is a weaker specification, while a negative delay indicates a stronger specification. A path satisfying a stronger specification satisfies a weaker one. TWTLPlan makes use of this feature by finding a path that satisfies a weaker specification first, then attempts to reduce the delay until the original specification is satified. These paths are computed using a sampling-based algorithm called RRT*.
You need Python2.7 with PIP installed, git and wget. The setup script is written in bash and has been tested only in Linux. You should also consider using virtualenvs.
Clone the repository with:
$ git clone https://github.com/franpenedo/twtlplan.git
Then run the setup script (optionally within a virtualenv):
$ ./setup.sh
You can run the provided examples with:
$ python run_benchmark.py draw examples.cs1
$ python run_benchmark.py draw examples.cs2
You must create a module with the following objects defined in it:
region: atwtlplan.util.Boxobject defining the domain of the scenario.obstacles: a list ofBoxes defining the obstacles in the scenario.props: a dictionary ofstrlabels toBoxrepresenting regions of interest in the scenario.spec: astrwith the TWTL specification. All regions of interest appearing in this formula must also appear as keys inprops.x_init: anumpy.arrayof shape(2,)with the initial position of the agent.d: afloatwith the step size.
A full description of TWTL, the algorithm implemented in TWTLPlan and an analysis of its performance can be found in our peer-reviewed publication Language-Guided Sampling-Based Planning using Temporal Relaxation.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see https://www.gnu.org/licenses/.
Copyright (C) 2016, Francisco Penedo Alvarez (contact@franpenedo.com)
Copyright (C) 2016, Cristian-Ioan Vasile (cvasile@lehigh.edu, cristian.ioan.vasile@gmail.com)